Denne artikkelen ble opprinnelig publisert i februar 2012.
Før konkurrerte vi mot europeiske aktører. Nå er det kineserne som puster oss i nakken, sier Tore Fløan.
Han er teknisk sjef hos Glen Dimplex Nordic i Stjørdal utenfor Trondheim. Her, i den 16 500 m2 store fabrikken, produseres moderne panelovner til et internasjonalt marked, med Russland som største kunde. Ifølge Fløan er det roboter som holder lavkost-kineserne på betryggende konkurranseavstand og sikrer videre drift, til tross for finanskrisa.
!["]()
I fabrikken arbeider cirka 120 medarbeidere på to skift, assistert av 15 produksjonsroboter – som jobber hele døgnet året rundt.
Bedriften, som en gang var norskeid og het Nobø Fabrikker, ble senere sammenslått med Siemens Electrical Heating, og er i dag en del av et internasjonalt, irsk industrikonsern med svært moderne produksjonslinjer.
– Jeg er overbevist om at det du ser her – det klarer ikke kineserne å gjøre verken billigere eller bedre, sier Fløan og smiler.
Han viser oss to gigantiske roboter som utfører en dans så elegant og synkront at den hadde vært en argentinsk tango verdig. Fra de innprogrammerte dansetrinnene fødes en ferdig montert komponent hvert fjortende sekund. Helt uten menneskelig inngripen.
Men effektive og ubemannede roboter har ikke fått de ansatte til å protestere. Her hos Glen Dimplex Nordic er de omfavnet av både klubb, ledelse, styre og eiere. De første produksjonsrobotene ble montert alt i 1998. Litt etter litt har det blitt flere. Og enda flere skal de bli.
– Vi har lenge hatt tradisjon for å jobbe sammen med NTNU og SINTEF. Flere av produksjonslinjene våre er resultater av dette samarbeidet. Nå deltar vi i forskningsprosjektet Next Generation Robotics for Norwegian Industry sammen med fem andre norske bedrifter. Målet er å utvikle roboter som har menneskelige evner og kan gjøre mer enn bare enkle, repetitive oppgaver. Dette kan blir nyttig for å opprettholde konkurransekraften, sier Fløan.
Den globale lavkostkarusellen
I fjerde etasje i det som på folkemunne kalles Electric Garden, på Gløshaugen i Trondheim, sitter forskningsleder Ingrid Schjølberg i SINTEF og skuer ut over historiske Trondheim. Men det er framtida som opptar henne. Som prosjektleder for satsinga «Next Generation Robotics» har hun så stor tro på roboter at hun spår de vil bli en del av hverdagen til deg og meg om ikke lenge. Men det som virkelig driver utviklingen innenfor fagfeltet, er bedrifter som nettopp Glen Dimplex Nordic.
– Skal norske vareproduserende bedrifter klare å hevde seg i en global og konkurranseutsatt verden, gjelder det å tenke smart. Derfor arbeider SINTEF og NTNU tett med industrien for å utvikle neste generasjon roboter: maskiner som kan se, gjøre egne vurderinger – og lære av dem, og sist, men ikke minst, utføre de oppgavene som du og jeg helst vil slippe, sier Schjølberg.
På deltakerlista i prosjektet står også Statoil, Hydro, Tronrud Engineering, SbSeating (HÅG) og RobotNorge. Tronrud Engineering har rollen som sluttleverandør: den som sørger for kommersialisering og robuste sluttprodukter.
Roboter i tungindustrien
Metallindustrien er en viktig underleverandør til annen norsk industri, og det er behov for å øke graden av automatisering i flere ledd av produksjonen for å stå bedre rustet i det internasjonale markedet. Robotisering er likevel lite utnyttet, forteller sjefingeniør Odd-Arne Lorentsen.
På aluminiumsverket på Sunndalsøra benyttes det karbon-anoder, som veier flere tonn, i elektrolyseprosessen. Anodene inngår som en del av prosessen, og forbrennes mens aluminium blir produsert. Etter 3–4 ukers drift blir anoderestene tatt ut fra elektrolysecella og erstattet med nye.
Et lag med knust elektrolytt blandet med alumina plasseres på toppen av de nye anodene for å redusere varmetapet og unngå at anodene brenner under drift. Og siden karbonet er verdifullt, må dette elektrolyttlaget fjernes når karbonrestene skal resirkuleres og gå inn i ny produksjon.
– Vi bruker en mer eller mindre helautomatisk anoderensestasjon i dag, men har slitt med at dette systemet ikke fjerner alle restene godt nok. De kan dermed ende opp i de nye anodene og forringe anodekvaliteten, sier Lorentsen.
Gjennom å bruke et robotsystem i kombinasjon med visuell deteksjon som kan se forskjell på anodemateriale og gjenvinningsrestene, håper Hydro Aluminium å få dette til automatisk.
I tillegg er det flere andre arbeidsposisjoner i dag, som bedriften vurder å automatisere.
– Greier vi å bruke roboter til flere av operasjonene, vil vi kunne forbedre nøyaktigheten og skjerme arbeiderne fra områder med støy og høy temperatur. Samarbeidet med NTNU/SINTEF har nå pågått i en treårsperiode, og jeg er overbevist om at dette prosjektet vil gi oss en plattform å bygge videre på, sier Lorentsen.
Et ROV-dyr
Enorme avstander. Isende kulde. Store havdyp, brutale bølger og giftige gasser. Det er kanskje ikke rart at Statoil med sine utfordringer også setter sin lit til roboter i framtida. Selskapet har i en årrekke vært brukere av såkalte ROV-er: små, fjernstyrte ubåter som er utstyrt med både kamera, verktøykasse og sist, men ikke minst, en hjerne konstruert for å utføre teknisk vedlikehold på de mest ugjestmilde områdene vi har – havbunnen. Nå retter de blikket over havoverflata. Målet er å ha operative og funksjonelle roboter på plattformdekket.
– Vi har de fire D-ene: Distent, Dull, Difficult og Dangerous, sier Anders Røyrøy. Han er prosjektleder for Statoils robotforskning og har store planer for de tenkende robotene. Men det er ikke av økonomiske årsaker:
![rep_rob_ill_stor_skolebenk]()
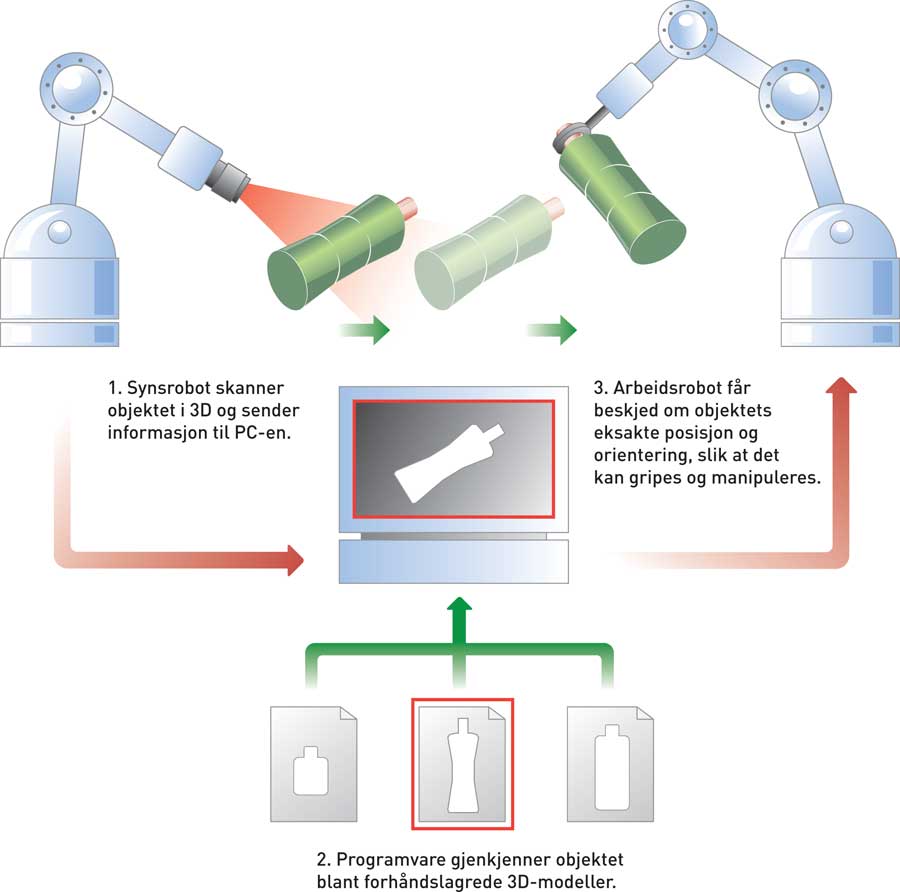
Slik lærer roboten å gripe nøyaktig: Den ene roboten er utstyrt med gripeverktøy. Den andre har 3D-syn (laser og avansert kamera) som gjenkjenner/finner posisjonen til ulike deler i en produksjonslinje. Når en gjenstand skannes, identifiserer et spesial-designet dataprogram delen, og finner ut hvor og hvordan delen ligger. Posisjonen sendes til robot nr. 2, som omsetter informasjonen til en bevegelse og griper den aktuelle delen.
Illustrasjon: Knut Gangåsæter
– Vi gjør ikke dette for å spare penger, men for å redusere risiko for tap av liv og helse. Robotene våre skal gjøre de farlige jobbene i områder som ikke egner seg for mennesker. Det vi driver med, er jo ikke akkurat serieproduksjon, sier han.
På en plattform kan ting gå galt, og i dag er mye automatisert: På boredekket brukes det for eksempel manipulatorer for å håndtere tunge borerør, slik at disse ikke skal falle ned på folk under brønnboring.
Statoil ser for seg at de nye robotene kan brukes til mer avanserte funksjoner, som å overvåke avanserte operasjoner langt til havs, detektere avvik, og kvalitetssikre arbeidet som utføres av andre.
– Vi vet at vi har lyktes på havbunnen. Nå skal vi få til automatiserte prosesser på plattformdekket. Det er vanskeligere, sier Røyrøy. – Under havoverflaten er det selvsagt at vi skal bruke fjernstyrte roboter, mens det på en plattform er lett å tenke at vi kan løse oppgavene med mennesker.
– Oljen som finnes i dag, er ofte i områder som ligger langt vekk, og i tillegg byr på farlige omgivelser. Det kan være store mengder svovel i lufta, og i Det kaspiske hav finnes blant annet hydrogensulfid som er en lammende gass. I tillegg kan temperaturene variere mellom minus 40 til pluss 40 grader. Roboter blir den eneste mulighet for å lykkes i disse områdene, sier han.
Statoil ser også for seg å bruke noe av teknologien fra robotforskningen inn mot framtidig vedlikehold og modifikasjoner av vindturbiner, hvor tilgjengeligheten er begrenset, og reisetiden ut til installasjonene blir lang.
Det krever at robotene må ha både syn, hukommelse og være operatørens forlengede arm ut i prosessen. I tillegg trengs et godt verktøy for navigasjon og posisjonering. Og det er nettopp et slikt system SINTEF nå jobber med å gi de kloke tøffingene.
Kunstig og kognitiv
![De to gigantiske robotene på Glen Dimplex Nordic i Stjørdal utfører sammen en elegant og synkron dans slik at en ferdig komponent er klar hvert 14. sekund.Foto: Gry Karin Stimo]()
De to gigantiske robotene på Glen Dimplex Nordic i Stjørdal utfører sammen en elegant og synkron dans slik at en ferdig komponent er klar hvert 14. sekund.
Foto: Gry Karin Stimo
Schjølberg forklarer: – Det finnes mange måter å lære en maskin å huske. Felles for alle roboter er at «hjernen» deres består av en digital tabell som roboten søker gjennom til den finner det riktige svar-alternativet.
– Logisk nok. Men hvordan lager dere selve tabellen?
– En av metodene er såkalt «offline learning». Den består i å styre roboten manuelt gjennom de operasjonene vi ønsker den skal gjøre. Og så gir vi den belønning når bevegelsene blir riktige. De «riktige» dataene legges så inn i tabellen.
– Hvordan belønnes en maskin?
– For roboten må naturligvis godbiten bestå av noe den forstår, og det er tall. Derfor kan vi for eksempel gi den pluss- eller minuspoeng etter hvordan den løser oppgavene. På denne måten mater vi den med kunstige erfaringer, og slik blir roboten i stand til å foreta vurderinger selv.
Etterhvert som den jobber, vil roboten faktisk lære av egne erfaringer, akkurat som oss. Utfordringen er å lage søk som er gode og raske nok til at dette poengsystemet fungerer i praksis.
Tradisjonsrik og innovativ
![Disse karbon-anodene er det Hydro vil at robot-er skal rense. De forbrennes som en del av prosessen og pådrar seg da et hvitt elektrolyttlag som må hakkes løs før anodene resirkuleres og går inn i ny produksjon.Foto: Thor Nielsen]()
Disse karbon-anodene er det Hydro vil at robot-er skal rense. De forbrennes som en del av prosessen og pådrar seg da et hvitt elektrolyttlag som må hakkes løs før anodene resirkuleres og går inn i ny produksjon.
Foto: Thor Nielsen
På tradisjonsrike Røros ligger stolprodusenten SbSeating (HÅG) som har lang tradisjon i å samarbeide med SINTEF og NTNU. Her passerer 265 000 stoler samlebåndet i løpet av et år, i mer enn ti tusen varianter. Alt produseres etter ordre og sendes samme dag som det lages.
– Vi har jobbet tett med forskerne med å utvikle produksjonsapparatet vårt, og det var beregninger derfra som overbeviste oss om at vi hadde mye å hente på intern logistikk og av å benytte roboter, sier Stein Are Kvikne.
Nå er den gode flyten og logistikken på plass. Utfordringa er å minimere de tunge, manuelle og teknisk krevende arbeidsoppgavene.
– Mange av delene våre kommer i bulk. Å gi robotene syn, slik at de kan plukke deler som ligger vilkårlig i en kasse, vil ha stor betydning for effektiviteten i fabrikken vår. Det samme gjelder automatisering av pakking som i dag er både fysisk krevende og ensformig.
En nøyaktig hånd
– Mass Customization er det som gjelder nå, sier Pål Ystgaard. – Stadig flere produkter individualiseres, og trenden gjør at de store fabrikkene må produsere varer på løpende bånd etter hvilke design kundene bestiller.
Denne dagen står forskerne Øystein Skotheim og Pål Ystgaard og finjusterer på en produksjonsrobot i laboratoriet. Den nesten to meter høye roboten ser ut som ser ut som en krysning av et sjiraffhode og en gigantisk, oransje drill. Dette er en «smartbot» som kan gripe ulike deler etter hva den måtte trenge for å utføre oppgaven sin. Roboten jobber i tospann – for ved siden av står en sølvfarget makker. Den er utstyrt med 3D-syn ved hjelp av en laser og et avansert kamera, og er i stand til å gjenkjenne og finne posisjonen til ulike deler i en produksjonslinje.
Skotheim har spesialisert seg på maskinsyn ved hjelp av ulike teknikker, og jobbet med alt fra digital dokumentasjon av helleristninger til kvalitetskontroll av bildeler.
«Next generation robotics»
Dette er et KMB-prosjekt under Norges forskningsråds BIA-program, og ledes av SINTEF IKT. Prosjektet har åtte partnere: SINTEF, NTNU, Statoil, Hydro, Tronrud Engineering, Glen Dimplex Nordic, SbSeating (HÅG) og RobotNorge.
Neste generasjon robotteknologi skal bli til gjennom å videreutvikle kompetansen i norske forskningsmiljøer/ deltakende
industri, utvikle ny robotteknologi og nye innovative robotløsninger.
Prosjektet går over fem år (2009–2014) med et budsjett på 36 mill. kroner. Det skal utdannes fire ph.d.-kandidater i prosjektet – knyttet opp mot NTNU (Institutt for teknisk kybernetikk og Institutt for produksjon og kvalitets teknikk).
– Sensoren som fungerer som robotens øyne benytter en laser til å lage en lysstripe som hele tiden observeres med et kamera, sier han. – Når det kommer gjenstander inn i synsfeltet til roboten, vil laserstripen endre form. Dette gjør oss i stand til å konstruere et 3D-bilde av gjenstandene som roboten ser.
Etter at en gjenstand har blitt skannet, kjøres det et spesialdesignet dataprogram for å identifisere delen, samt finne ut hvor og hvordan delen ligger. Posisjonen sendes så til robot nummer to, som omsetter informasjonen til en spesifikk bevegelse. Dermed kan roboten gripe den aktuelle delen i produksjonslinja, uansett hvordan den ligger – og hva den måtte være.
– I dag finnes det ikke løsninger som gjør at roboter på en fleksibel måte kan gjenkjenne og gripe mange ulike deler, fordi robotene bare er utstyrt med todimensjonalt syn og bare kan utføre svært standardiserte bevegelser, forteller Skotheim.
![Den lille roboten Rulle kan hjelpe Ingrid Schjølberg med å bære ting, for han følger trofast etter dit hun går, og stopper på kommando. – Teknologien er lett å overføre til andre om-råder, sier Schjølberg.Foto: Thor Nielsen]()
Den lille roboten Rulle kan hjelpe Ingrid Schjølberg med å bære ting, for han følger trofast etter dit hun går, og stopper på kommando. – Teknologien er lett å overføre til andre områder, sier Schjølberg.
Foto: Thor Nielsen
Det betyr at om det skjer en liten endring i produksjonsrekka, må hele roboten reprogrammeres. Noe som er både kostbart og krevende.
Skotheim og Ystgaard har nå lyktes med å gi de avanserte maskinene evnen til å se i tre dimensjoner, sånn at de blir i stand til å løse mer komplekse oppgaver i produksjonslinjene.
– Teknologi som gjør det mulig å kombinere skreddersøm med masseproduksjon, er det som skal gjøre norsk vareproduserende industri konkurransedyktig i en verden hvor vi konkurrerer med land som har langt lavere produksjonskostnader, sier Ystgaard.
Nå blir oppgaven å finne ut hvordan dette kan gjøres på smartest mulig måte, sånn at vi kan få maskiner til å utføre arbeidsoppgaver vi mennesker helst vil slippe – og samtidig lære av de feilene de gjør, sånn at de blir enda mer effektive.
Fra dekk til stue
– Han kommer når du vinker, og så kan han hjelpe til med å bære ting for deg, for han følger trofast etter dit du går, og stopper på kommando. Vi kaller den Rulle, sier Ingrid Schjølberg.
– Jeg synes ikke han er så kjekk, akkurat, så vi har planer om å forbedre designet, sier hun og drar hånda over det praktiske, men ikke spesielt vakre «transportbrettet» som er en del av roboten. Brettet hever og senker seg automatisk etter brukerens behov, og den lille tassen kunne sikkert jobbet som ryddehjelp i en restaurant, kantine eller på en institusjon.
– Robotteknologien vi nå utvikler er såkalt «generisk teknologi»; det betyr at den er lett å overføre til andre områder. Velferdsteknologi for eldre er noe som er i vinden, og vi ser at Rulle for eksempel kunne ha hjulpet eldre mennesker med enkle oppgaver som å frakte skittentøy eller dagligvarer på hjemmebane, sier Schjølberg.